Programación I.
La programación es una muy necesaria formación si quieres programar y administrar aplicaciones eléctricas gobernadas por Arduino UNO. En este capítulo aprenderás los conceptos básicos de programación que necesitas para desarrollar aplicaciones eléctricas y gobernarlas con la placa Arduino UNO. Así que sin más rollo empezamos por lo básico.
Estructura básica de un programa.
La estructura básica del lenguaje de programación de Arduino es bastante simple y se compone de al menos dos partes. Estas dos partes necesarias, o funciones, encierran bloques que contienen declaraciones, estamentos o instrucciones.
En donde setup() es la parte encargada de recoger la configuración y loop() es la que contienen el programa que se ejecutará repetidamente. Ambas funciones son necesarias para que el programa trabaje.
La función de configuración setup(), debe contener la declaración de las variables. Es la primera función a ejecutar en el programa, se ejecuta sólo una vez, y se utiliza para configurar o inicializar pinMode (modo de trabajo de las E/S), configuración de la comunicación en serie y otras.
La función bucle (loop) siguiente contiene el código que se ejecutara continuamente (lectura de entradas, activación de salidas). Esta función es el núcleo de todos los programas de Arduino y la que realiza la mayor parte del trabajo.
La función setup() se invoca una sola vez cuando el programa empieza. Se utiliza para inicializar los modos de trabajo de los pines, o el puerto serie. Debe ser incluido en un programa aunque no haya declaración que ejecutar.
Después de llamar a setup(), la función loop() hace precisamente lo que sugiere su nombre, se ejecuta de forma cíclica, lo que posibilita que el programa este respondiendo continuamente ante los eventos que se produzcan en la tarjeta.
Funciones
Una función es un bloque de código que tiene un nombre y un conjunto de sentencias que son ejecutados cuando se llama a la función.
Son funciones, setup() y loop() de las que ya se ha hablado. Las funciones de usuario pueden ser escritas para realizar tareas repetitivas y para reducir el tamaño de un programa. Las funciones se declaran asociadas a un tipo de valor dependiendo del tipo que lleve asociado. Este valor será el que devolverá la función; por ejemplo int se utilizará cuando la función devuelva un dato numérico de tipo entero. Si la función no devuelve ningún valor entonces se colocará delante la palabra void, que significa función vacía.
Después de declarar el tipo de dato que devuelve la función se debe escribir el nombre de la función y entre paréntesis se escribirán, si es necesario, los parámetros que se deben pasar a la función para que se ejecute.
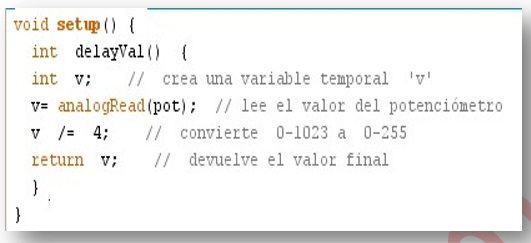
La función siguiente devuelve un número entero, delayVal() se utiliza para poner un valor de retraso en un programa que lee una variable analógica de un potenciómetro conectado a una entrada de Arduino. Al principio se declara como una variable local, ´v´ recoge el valor leído del potenciómetro que estará comprendido entre 0 y 1023, luego se divide el valor por 4 para ajustarlo a un margen comprendido entre 0 y 255, finalmente se devuelve el valor v y se retornaría al programa principal. Esta función cuando se ejecuta devuelve el valor de tipo entero v.
Lo básico.
Las llaves sirven para definir el principio y el final de un bloque de instrucciones. Se utilizan para los bloques de programación setup(), loop(), if…, etc.
type funcion() { sentencias; }
Una llave de apertura {, siempre debe ir seguida de una llave de cierre }, si no es así el programa dará errores.
El entorno de programación de Arduino incluye una herramienta de gran utilidad para comprobar el total de llaves. Sólo tienes que hacer click en el punto de inserción de una llave abierta e inmediatamente se marca el correspondiente cierre de ese bloque (llave cerrada).
El punto y coma (;) se utiliza para separar instrucciones en el lenguaje de programación de Arduino. También se utiliza para separar elementos en una instrucción de tipo bucle.
int x = 13; // declara la variable 'x' como tipo entero de valor 13
Nota: Olvidarse de poner fin a una línea con un punto y coma se traducirá en un error de compilación. El texto de error puede ser obvio, y se referirá a la falta de una coma, o puede que no. Si se produce un error raro y de difícil detección lo primero que debemos hacer es comprobar que los puntos y comas están colocados al final de las instrucciones.
Los bloques de comentarios, o multi línea de comentarios, son áreas de texto ignorados por el programa que se utilizan para las descripciones del código o comentarios que ayudan a comprender el programa. Comienzan con /* y terminan con */ y pueden abarcar varias líneas.
/* esto es un bloque de comentario
no se debe olvidar cerrar los comentarios estos deben estar equilibrados
*/
Debido a que los comentarios son ignorados por el programa y no ocupan espacio en la memoria de Arduino pueden ser utilizados con generosidad y también pueden utilizarse para comentar bloques de código con el propósito de anotar informaciones para depuración.
Una línea de comentario empieza con // y terminan al final de la misma línea. Al igual que los comentarios de bloque, los de línea son ignoradas por el programa y no ocupan espacio en la memoria.
// Esto es un comentario
Una línea de comentario se utiliza a menudo después de una instrucción, para proporcionar más información acerca de lo que hace esta o para recordarla más adelante.
Variables.
Una variable es una manera de nombrar y almacenar un valor numérico para su uso posterior por el programa. Como su nombre indica, las variables son números que se pueden variar continuamente en contra de lo que ocurre con las constantes cuyo valor nunca cambia.
Una variable debe ser declarada y, opcionalmente, asignarle un valor.
El siguiente código de ejemplo declara una variable llamada variableEntrada y luego le asigna el valor obtenido en la entrada analógica del PIN2:

variableEntrada es la variable en sí.
La primera línea declara que será de tipo entero.
La segunda línea fija a la variable el valor correspondiente a la entrada analógica PIN2. Esto hace que el valor de PIN2 sea accesible en otras partes del código.
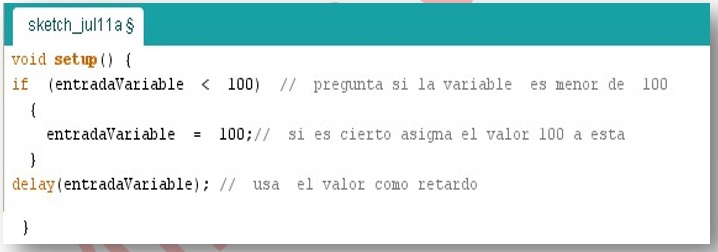
Como ejemplo ilustrativo veamos tres operaciones útiles con variables. El siguiente código prueba si la variable entradaVariable es inferior a 100, si es cierto se asigna el valor 100 a entradaVariable y, a continuación, establece un retardo delay utilizando como valor entradaVariable que ahora será como mínimo de valor 100:
Nota: Las variables deben tomar nombres descriptivos, para hacer el código más legible. Nombres de variables pueden ser contactoSensor o pulsador, para ayudar al programador y a cualquier otra persona a leer el código y entender lo que representa la variable. Nombres de variables como var o valor, facilitan muy poco que el código sea inteligible.
Una variable puede ser cualquier nombre o palabra que no sea una palabra reservada en el entorno de Arduino. Todas las variables tienen que declararse antes de que puedan ser utilizadas. Para declarar una variable se comienza por definir su tipo como int (entero), long (largo), float (coma flotante), byte (bits), bolean (TRUE – FALSE), etc., asignándoles siempre un nombre (identificador), y opcionalmente un valor inicial. Esto sólo debe hacerse una vez en un programa, pero el valor se puede cambiar en cualquier momento usando aritmética y reasignaciones diversas.
El siguiente ejemplo declara la variable entradaVariable como una variable de tipo entero int, y asignándole un valor inicial igual a cero. Esto se llama una asignación.
int entradaVariable = 0;
Una variable puede ser declarada en una serie de lugares del programa y en función del lugar en donde se lleve a cabo la definición esto determinará en que partes del programa se podrá hacer uso de ella. Una variable puede ser declarada al inicio del programa antes de la parte de configuración setup(), a nivel local dentro de las funciones, y, a veces, dentro de un bloque, como para los bucles del tipo if, for, witch, etc.
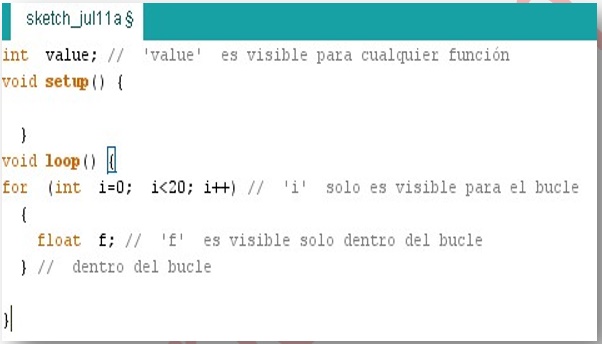
En función del lugar de declaración de la variable así se determinara el ámbito de aplicación, o la capacidad de ciertas partes de un programa para hacer uso de ella. Una variable global es aquella que puede ser vista y utilizada por cualquier función y sentencia de un programa. Esta variable se declara al comienzo del programa, antes de setup(). Una variable local es aquella que se define dentro de una función o como parte de un bucle. Sólo es visible y sólo puede utilizarse dentro de la función en la que se declaró.
Por lo tanto, es posible tener dos o más variables del mismo nombre en diferentes partes del mismo programa que pueden contener valores diferentes. La garantía de que sólo una función tiene acceso a sus variables dentro del programa simplifica y reduce el potencial de errores de programación. El siguiente ejemplo muestra cómo declarar a unos tipos diferentes de variables y la visibilidad de cada variable:
Byte.
Byte almacena un valor numérico de 8 bits sin decimales. Tienen un rango entre 0 y 255
byte unaVariable = 180; // declara 'unaVariable' como tipo byte
Int.
Enteros. Son un tipo de datos primarios que almacenan valores numéricos de 16 bits sin decimales comprendidos en el rango 32767 a -32768.
int unaVariable = 1500; // declara 'unaVariable' como una variable de tipo entero
Nota: Las variables de tipo entero int pueden sobrepasar su valor máximo o mínimo como consecuencia de una operación. Por ejemplo, si x = 32767 y una posterior declaración agrega 1 a x, x = x + 1 entonces el valor se x pasará a ser -32768 (Algo así como que el valor da la vuelta).
Long.
El formato de variable numérica de tipo extendido long se refiere a números enteros (tipo 32 bits) sin decimales que se encuentran dentro del rango -2147483648 a 2147483647.
long unaVariable = 90000; // declara 'unaVariable' como tipo long
Float.
El formato de dato del tipo punto flotante float se aplica a los números con decimales. Los números de punto flotante tienen una mayor resolución que los de 32 bits con un rango comprendido 3.4028235E +38 a +38-3.4028235E.
float unaVariable = 3.14; // declara 'unaVariable' como tipo flotante
Nota: Los números de punto flotante no son exactos, y pueden producir resultados extraños en las comparaciones. Los cálculos matemáticos de punto flotante son también mucho más lentos que los del tipo de números enteros, por lo que debe evitarse su uso si es posible.
Array.
Un array es un conjunto de valores a los que se accede con un número índice. Cualquier valor puede ser recogido haciendo uso del nombre de la matriz y el número del índice. El primer valor de la matriz es el que está indicado con el índice 0, es decir el primer valor del conjunto es el de la posición 0. Un array tiene que ser declarado y opcionalmente asignados valores a cada posición antes de ser utilizado
int miArray[] = {valor0, valor1, valor2...}
Del mismo modo es posible declarar una matriz indicando el tipo de datos y el tamaño y posteriormente, asignar valores a una posición especifica:
int miArray[5]; // declara un array de enteros de 6 posiciones
miArray[3] = 10; // asigna el valor 10 a la posición 4 Para leer de un array basta con escribir el nombre y la posición a leer:
x = miArray[3]; // x ahora es igual a 10 que está en la posición 3 del array
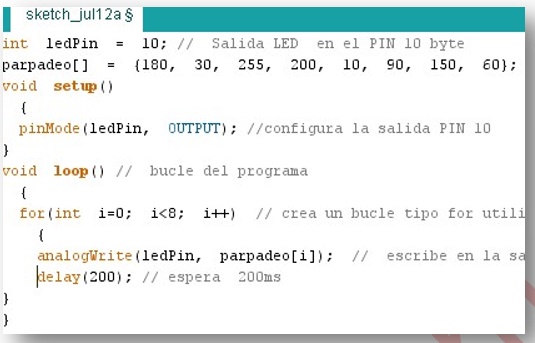
Las matrices (arrays) se utilizan a menudo para sentencias de tipo bucle, en los que la variable de incremento del contador del bucle se utiliza como índice o puntero del array. El siguiente ejemplo usa una matriz para el parpadeo de un LED. Utilizando un bucle tipo for, el contador comienza en cero 0 y escribe el valor que figura en la posición de índice 0 en la serie que hemos escrito dentro del array parpadeo[], en este caso 180, que se envía a la salida analógica tipo PWM configurada en el PIN10, se hace una pausa de 200 ms y a continuación se pasa al siguiente valor que asigna el índice i.
Operadores aritméticos.
Los operadores aritméticos que se incluyen en el entorno de programación son suma, resta, multiplicación y división. Estos devuelven la suma, diferencia, producto, o cociente (respectivamente) de dos operandos.
y = y + 3; x = x - 7; i = j * 6; r = r / 5;
La operaciones se efectúa teniendo en cuanta el tipo de datos que hemos definido para los operandos (int, double, float, etc.), por lo que, por ejemplo, si definimos 9 y 4 como enteros int, 9 ÷ 4 devuelve de resultado 2 en lugar de 2,25 ya que el 9 y 4 se valores de tipo entero int (enteros) y no se reconocen los decimales con este tipo de datos. Esto también significa que la operación puede sufrir un desbordamiento si el resultado es más grande que lo que puede ser almacenada en el tipo de datos. Recordemos el alcance de los tipos de datos numéricos que ya hemos explicado anteriormente.
Si los operandos son de diferentes tipos, para el cálculo se utilizará el tipo más grande de los operandos en juego. Por ejemplo, si uno de los números (operandos) es del tipo float y otra de tipo int, para el cálculo se utilizará el método de float es decir el método de coma flotante. Elija el tamaño de las variables de tal manera que sea lo suficientemente grande como para que los resultados sean lo precisos que usted desea. Para las operaciones que requieran decimales utilice variables tipo float, pero sea consciente de que las operaciones con este tipo de variables son más lentas a la hora de realizarse el cómputo.
Asignaciones compuestas.
Las asignaciones compuestas combinan una operación aritmética con una variable asignada. Estas son comúnmente utilizadas en los bucles tal como se describe más adelante. Estas asignaciones compuestas pueden ser:
x ++ // igual que x = x + 1
x-- // igual que x = x - 1
x += y // igual que x = x + y
x -= y // igual que x = x - y
x *= y // igual que x = x * y
x /= y // igual que x = x / y
Nota: Por ejemplo, x *= 3 hace que x se convierta en el triple del antiguo valor x y por lo tanto x es reasignada al nuevo valor.
Las comparaciones de una variable o constante con otra se utilizan con frecuencia en las estructuras condicionales del tipo if, para testear si una condición es verdadera.
En los ejemplos que siguen en las próximas páginas se verá su utilización práctica usando los siguientes tipo de condicionales:
x == y // x es igual a y
x != y // x no es igual a y
x < y // x es menor que y
x > y // x es mayor que y
x <= y // x es menor o igual que y
x >= y // x es mayor o igual que y
Los operadores lógicos son usualmente una forma de comparar dos expresiones y devolver un VERDADERO o FALSO dependiendo del operador. Existen tres operadores lógicos, AND (&&), OR (||) y NOT (!), que a menudo se utilizan en estamentos de tipo if:
Lógica AND: if (x > 0 && x < 5) // cierto sólo si las dos expresiones son ciertas
Lógica OR: if (x > 0 || y < 0) // cierto si una cualquiera de las expresiones es cierta
Lógica NOT: if (!x > 0) // cierto solo si la expresión es falsa
Constantes.
El lenguaje de programación de Arduino tiene unos valores predeterminados, que son llamados constantes. Se utilizan para hacer los programas más fáciles de leer. Las constantes se clasifican en grupos.
TRUE - FALSE:
Estas son constantes booleanas que definen los niveles HIGH (alto) y LOW (bajo) cuando estos se refieren al estado de las salidas digitales. FALSE se asocia con 0 (cero), mientras que TRUE se asocia con 1, pero TRUE también puede ser cualquier otra cosa excepto cero.
if (b == TRUE); { ejecutar las instrucciones; }
HIGH - LOW:
Estas constantes definen los niveles de salida altos o bajos y se utilizan para la lectura digitalRead(), o la escritura digital digitalWrite() para las patillas. ALTO se define como en la lógica de nivel 1, ON, ó 5 voltios, mientras que BAJO es lógica nivel 0, OFF, ó 0 voltios.
digitalWrite(13, HIGH); // activa la salida 13 con un nivel alto (5v.)
INPUT - OUTPUT:Estas constantes son utilizadas para definir, al comienzo del programa, el modo de funcionamiento de los pines mediante la instrucción pinMode de tal manera que el pin puede ser una entrada INPUT o una salida OUTPUT.
pinMode(13, OUTPUT); // designamos que el PIN 13 es una salida
IF
Es una sentencia de condición que se utiliza para probar si una determinada condición se ha alcanzado, como por ejemplo averiguar si un valor analógico está por encima de un cierto número, y ejecutar una serie de declaraciones (operaciones) que se escriben dentro de llaves, si es verdad. Si es falso (la condición no se cumple) el programa salta y no ejecuta las operaciones que están dentro de las llaves. El formato para if es el siguiente:
if (unaVariable ?? valor)
{ ejecutaInstrucciones; }
En el ejemplo anterior se compara una variable con un valor, el cual puede ser una variable o constante. Si la comparación, o la condición entre paréntesis se cumple (es cierta), las declaraciones dentro de los corchetes se ejecutan. Si no es así, el programa salta sobre ellas y sigue.
Nota: Tenga en cuenta el uso especial del símbolo '=', poner dentro de if (x = 10), podría parecer que es válido pero sin embargo no lo es ya que esa expresión asigna el valor 10 a la variable x, por eso dentro de la estructura if se utilizaría X==10 que en este caso lo que hace el programa es comprobar si el valor de x es 10. Ambas cosas son distintas por lo tanto dentro de las estructuras if, cuando se pregunte por un valor se debe poner el signo doble de igual “==”
IF - ELSE:
If, else viene a ser un estructura que se ejecuta en respuesta a la idea “si esto no se cumple haz esto otro”. Por ejemplo, si se desea probar una entrada digital, y hacer una cosa si la entrada fue alto o hacer otra cosa si la entrada es baja, usted escribiría que de esta manera:
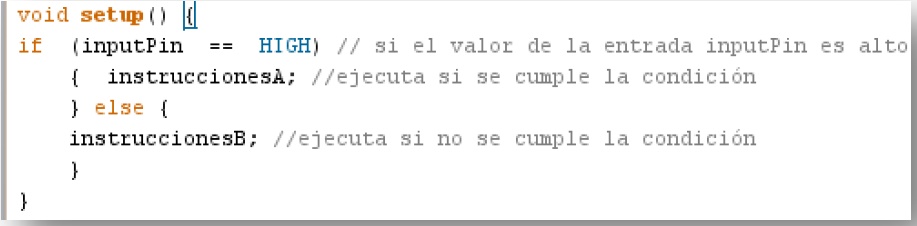
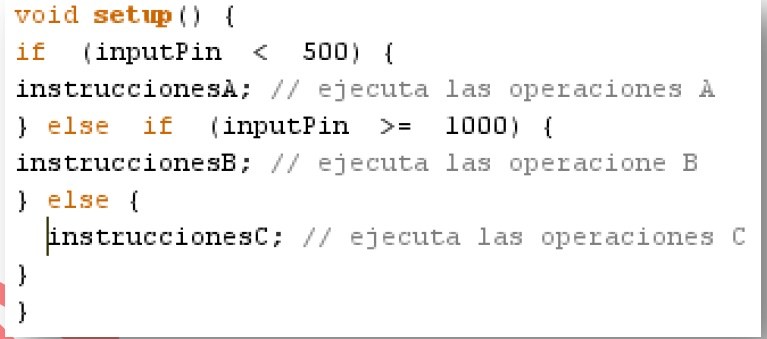
Else puede ir precedido de otra condición de manera que se pueden establecer varias estructuras condicionales de tipo unas dentro de las otras (anidamiento) de forma que sean mutuamente excluyentes pudiéndose ejecutar a la vez. Es incluso posible tener un número ilimitado de estos condicionales. Recuerde sin embargo qué sólo un conjunto de declaraciones se llevará a cabo dependiendo de la condición probada:
FOR:
La declaración for se usa para repetir un bloque de sentencias encerradas entre llaves un número determinado de veces. Cada vez que se ejecutan las instrucciones del bucle se vuelve a testear la condición. La declaración for tiene tres partes separadas por (;) vemos el ejemplo de su sintaxis:
for (inicialización; condición; expresión)
{ ejecutaInstrucciones;}
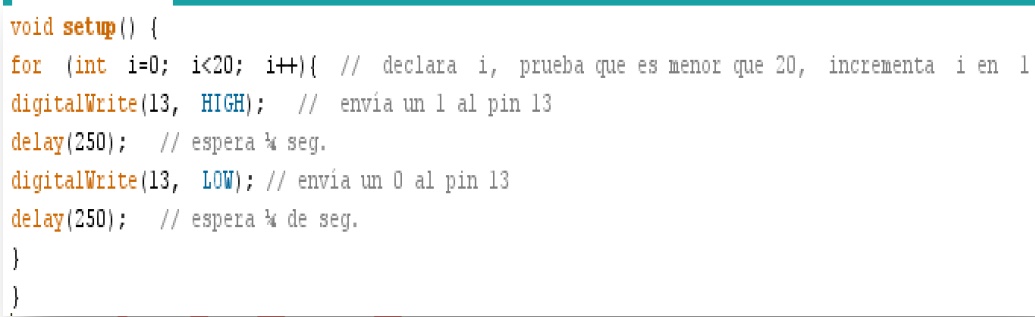
La inicialización de una variable local se produce una sola vez y la condición se testea cada vez que se termina la ejecución de las instrucciones dentro del bucle. Si la condición sigue cumpliéndose, las instrucciones del bucle se vuelven a ejecutar. Cuando la condición no se cumple, el bucle termina. El siguiente ejemplo inicia el entero i en el 0, y la condición es probar que el valor es inferior a 20 y si es cierta, i se incrementa en 1 y se vuelven a ejecutar las instrucciones que hay dentro de las llaves:
WHILE:
Un bucle del tipo while es un bucle de ejecución continua mientras se cumpla la expresión colocada entre paréntesis en la cabecera del bucle. La variable de prueba tendrá que cambiar para salir del bucle. La situación podrá cambiar a expensas de una expresión dentro el código del bucle o también por el cambio de un valor en una entrada de un sensor.
while (unaVariable ?? valor) { ejecutarsentencias; }
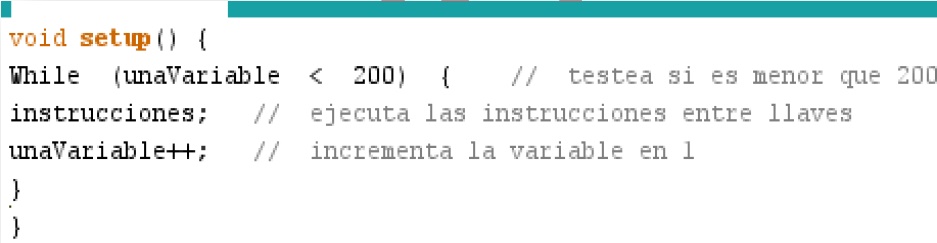
El siguiente ejemplo prueba si la variable unaVariable es inferior a 200 y, si es verdad, ejecuta las declaraciones dentro de los corchetes y continuará ejecutando el bucle hasta que unaVariable no sea inferior a 200.
DO WHILE:
El bucle do while funciona de la misma manera que el bucle while, con la salvedad de que la condición se prueba al final del bucle, por lo que el bucle siempre se ejecutará al menos una vez.
do { Instrucciones; } while (unaVariable ?? valor);
El siguiente ejemplo asigna el valor leído leeSensor() a la variable x, espera 50 milisegundos, y luego continua mientras que el valor de la x sea inferior a 100:
do {
x = leeSensor();
delay(50);
} while (x < 100);
pinMode(PIN/ESTADO):
Esta instrucción es utilizada en la parte de configuración setup() y sirve para configurar el modo de trabajo de un PIN pudiendo ser INPUT (entrada) u OUTPUT (salida).
pinMode(pin, OUTPUT); // configura ‘pin’ como salida
Los terminales de Arduino, por defecto, están configurados como entradas, por lo tanto no es necesario definirlos en el caso de que vayan a trabajar como entradas. Los pines configurados como entrada quedan, bajo el punto de vista eléctrico, como entradas en estado de alta impedancia. Estos pines tienen a nivel interno una resistencia de 20 KΩ a las que se puede acceder mediante software. Estas resistencias se acceden de la siguiente manera:
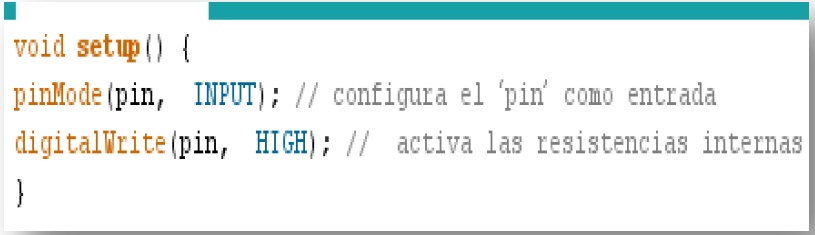
Las resistencias internas normalmente se utilizan para conectar las entradas a interruptores. En el ejemplo anterior no se trata de convertir un pin en salida, es simplemente un método para activar las resistencias interiores. Los pines configurado como OUTPUT (salida) se dice que están en un estado de baja impedancia estado y pueden proporcionar 40mA de corriente a otros dispositivos y circuitos. Esta corriente es suficiente para alimentar un diodo LED (no olvidando poner una resistencia en serie), pero no es lo suficiente grande como para alimentar cargas de mayor consumo como relés, solenoides, o motores. Un cortocircuito en las patillas Arduino provocará una corriente elevada que puede dañar o destruir el chip Atmega. A menudo es una buena idea conectar en la OUTUPT (salida) una resistencia externa de 470Ω o de 1kΩ.
digitalRead(PIN):
Lee el valor de un pin (definido como digital) dando un resultado HIGH (alto) o LOW (bajo).El pin se puede especificar ya sea como una variable o una constante (0-13).
valor = digitalRead(Pin);// hace que 'valor sea igual al estado leído en ´Pin´
Envía al pin definido previamente como OUTPUT el valor HIGH o LOW (poniendo en 1 o 0 la salida). El pin se puede especificar ya sea como una variable o como una constante (0-13).
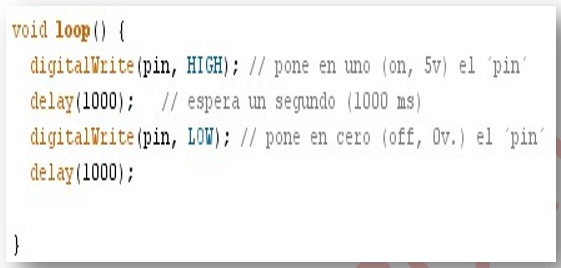
digitalWrite(PIN)
digitalWrite(pin, HIGH); // deposita en el 'pin' un valor HIGH (alto o 1)
El siguiente ejemplo lee el estado del pin 13:
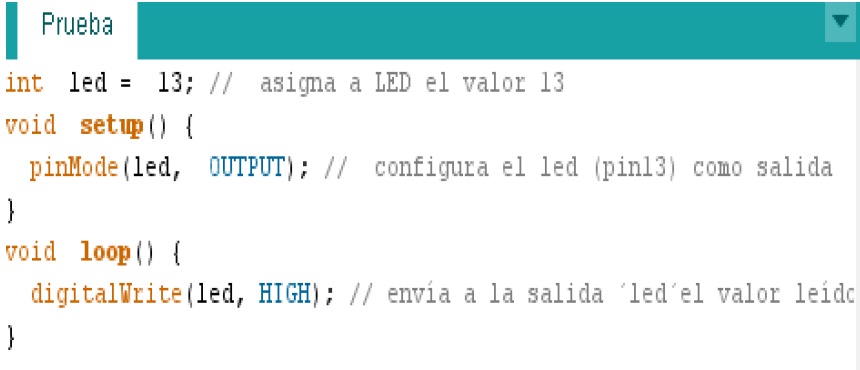
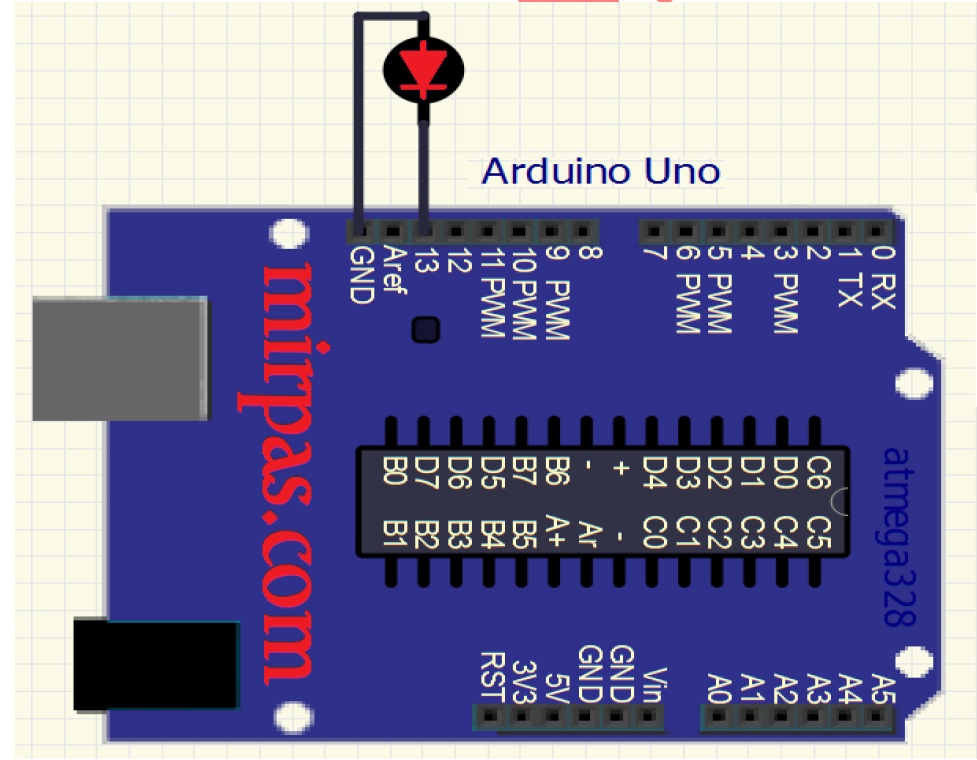
Así pues construyendo el circuito conectando con un led el ánodo al puerto 13 digital, y el cátodo al puerto GND veremos que se enciende cuando cargamos el sketch.